Control the position of a RC (hobby) servo motor with your Arduino and a potentiometer.
This example makes use of the Arduino servo library.
The potentiometer should be wired so that its two outer pins are connected to power (+5V) and ground, and its middle pin is connected to analog input 0 on the board.


http://news.chivindo.com/679/knob.html
This example makes use of the Arduino servo library.
Step 1: What You Need?
1 x Arduino Board ( Arduino UNO used in this tutorial)
1 x Servo Motor
1 x 10k Ohm Potentiometer
1 x USB Type-B Cable
1 x Servo Motor
1 x 10k Ohm Potentiometer
1 x USB Type-B Cable
Don't have components? Don't worry. Just click the component's name.
Step 2: Build Your Circuit.
Servo motors have three wires: power, ground, and signal. The power wire is typically red, and should be connected to the 5V pin on the Arduino board. The ground wire is typically black or brown and should be connected to a ground pin on the board. The signal pin is typically yellow, orange or white and should be connected to pin 9 on the board.The potentiometer should be wired so that its two outer pins are connected to power (+5V) and ground, and its middle pin is connected to analog input 0 on the board.

Step 3: Upload The Code.
1. Select the Arduino board type: Select Tools >> Board >> Select your correct Arduino board used.
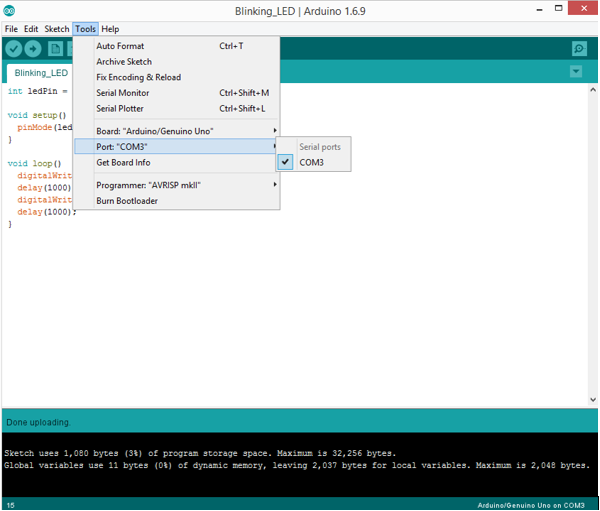
2. Find the port number by accessing device manager on Windows. See the section Port (COM&LPT) and look for an open port named "Arduino Uno (COMxx)". If you are using a different board, you will find a name accordingly. What matters is the xx in COMxx part. In my case, it's COM3. So my port number is 3.
Select the right port: Tools >> Port >> Select the port number.
3. You can find this code in the example of Arduino IDE.
Select File >> Examples >> Servo >> Knob
Click press the "upload" button (see the button with right arrow mark).
/*
Controlling a servo position using a potentiometer (variable resistor)
by Michal Rinott <http://people.interaction-ivrea.it/m.rinott> modified on 8 Nov 2013
by Scott Fitzgerald
http://www.arduino.cc/en/Tutorial/Knob
*/ #include <Servo.h> Servo myservo; // create servo object to control a servo int potpin = 0; // analog pin used to connect the potentiometer
int val; // variable to read the value from the analog pin void setup() {
myservo.attach(9); // attaches the servo on pin 9 to the servo object
} void loop() {
val = analogRead(potpin); // reads the value of the potentiometer (value between 0 and 1023)
val = map(val, 0, 1023, 0, 180); // scale it to use it with the servo (value between 0 and 180)
myservo.write(val); // sets the servo position according to the scaled value
delay(15); // waits for the servo to get there
}
Comments
Post a Comment